一直以来,像人类一样开车都被看作是自动驾驶技术发展的绝佳方向,由于视觉可以获取极为丰富的环境信息, 因此“纯视觉”技术也被看作是自动驾驶乃至新一代机器人的核心能力。在自动驾驶技术快速发展的今天,Nullmax纽劢创新的纯视觉自动驾驶技术不仅突破了传统自动驾驶对高精度地图的依赖,还以卓越的场景理解能力和高效算力需求,为自动驾驶技术的普及和广泛应用开辟了新道路。

纯视觉技术:自动驾驶的核心能力
通过AI和摄像头,Nullmax纽劢的纯视觉自动驾驶系统能够像人类一样识别画面中的颜色、形状、纹理及空间关系信息,准确理解周围的世界。这一技术使得自动驾驶汽车能够识别路沿、栅栏、车道线,检测行人、车辆及交通标志等,并直接输出驾驶行为,为自动驾驶带来了无限可能。

全场景智驾:无需地图,有路就能开
Nullmax纽劢的纯视觉自动驾驶技术实现了真正意义上的全场景智驾。在复杂的道路环境中,该技术能够实时获取所需的环境信息,无需任何地图提供道路属性和拓扑关系。例如,Nullmax纽劢的7V纯视觉车辆在从一条道路转入另一条道路时,能够准确识别路口新增的左转车道,平滑汇入车流,并绕过障碍物完成转弯。这一过程中,系统通过红色的点描绘出道路边界,蓝色和绿色线条表示车道情况,黄色线条规划出自车行驶轨迹,不同颜色的方框则区分不同类型的车辆和行人。这些看似简单的点、线、框,展示了Nullmax纽劢端到端自动驾驶模型出色的场景理解能力,尤其是对复杂道路结构的深刻理解。
端到端模型:算力需求低,性价比高
Nullmax纽劢的端到端自动驾驶模型将视觉信息作为主要输入,车辆只需配备基础的摄像头,根据导航系统提供的指令,即可实现城市场景的点到点智能驾驶。该模型如同人类大脑一般,基于视觉信号输入,完成场景理解和行为规划,直接输出驾驶行为。由于传感器配置简单,整体算力需求相对较低,Nullmax纽劢的技术方案可以在100T稀疏算力内实现城市场景的领航功能。这一特点使得即便是价位相对便宜的车型,也能享受到安全、智能的驾驶体验。
技术领先:多项研究成果获国际认可
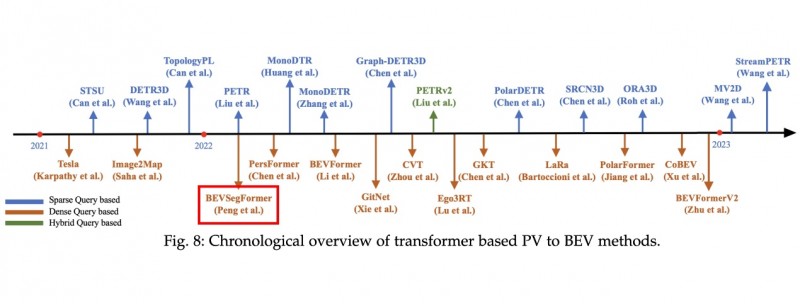
Nullmax纽劢在纯视觉自动驾驶领域的研究成果获得了国际学术界的广泛认可。公司先后发表了适用于任意相机配置的实时生成局部地图方法BEVSegFormer,以及不显式构建BEV的高效3D车道线检测方法CurveFormer,并被WACV和ICRA等国际学术会议收录。此外,Nullmax纽劢还在今年的国际计算机视觉顶级会议CVPR和ECCV上发表了两篇纯视觉目标检测研究,进一步提升了其纯视觉自动驾驶技术的竞争力。

随着Nullmax纽劢在纯视觉自动驾驶技术领域的不断深耕,该技术将为自动驾驶的普及和广泛应用提供更加有力的支持,为人们的出行带来更加便捷、安全、智能的体验。
